Возьмем для примера простейшую задачу: необходимо включить пресс через 1 секунду после одновременного удержания оператором двух кнопок в нажатом состоянии. Таким образом, мы гарантируем, что обе руки оператора заняты и даем ему время на контроль готовности машины. Самое простое решение это соединить контакты обеих кнопок последовательно и поставить электронное реле с таймером. Если таймер допускает регулировку времени задержки, то подобная схема обеспечит некоторую гибкость системы, впрочем не слишком высокую.
Любые дополнительные условия, например требование контроля последовательности нажатий кнопок поставит нас в затруднительную ситуацию - мы будем вынуждены изменить схему, введя дополнительные реле. Это не является сложной проблемой при условии, что такая необходимость возникает крайне редко.
Но в условиях конкурентного производства время выхода нового продукта на рынок имеет решающее значение и поэтому когда речь идет о гибком автоматизированном производстве, переналадка оборудования должна выполняться быстро, с минимальными затратами.
Дополнительной проблемой является увеличение сложности системы управления по мере развития производства и появления дополнительных функций (усложнения алгоритма работы).
Любой специалист по автоматизации сталкивался также с проблемой построения системы управления для оборудования в той предметной области, которая ему недостаточно знакома: отсутствие четкой постановки задачи, появление новых условий по мере внедрения оборудования может сделать невозможной успешную реализацию проекта.
Необходимо было создать управляющее устройство, алгоритм работы которого можно было бы менять, не переделывая монтажную схему системы управления, и в результате возникла логичная идея заменить системы управления с «жесткой» логикой работы (совокупность реле, регуляторов, таймеров и т.д.) на автоматы с программно заданной логикой работы. Так родились программируемые логические контроллеры (ПЛК) . Впервые ПЛК были применены в США для автоматизации конвейерного сборочного производства в автомобильной промышленности (1969 г.).
Поскольку в определении «программируемый логический контроллер» главным являлось «программируемый», то практически сразу возник вопрос, как программировать ПЛК?
Алгоритмические языки программирования компьютеров того времени были ориентированы на решение вычислительных задач. Профессия программиста считалась исключительно редкой и трудной, таких специалистов не было ни на одном производстве. Идеальным вариантом могла бы стать автоматическая трансляция принципиальных схем релейных автоматов в программы для ПЛК.
Почему бы и нет? Так в ПЛК появился язык релейно-контактных схем (РКС или LD в английских источниках Ladder Diagram) . Специалист-технолог мог “перерисовать” схему управления на дисплее программирующей станции ПЛК. Естественно схема изображалась не графически а посредством условных символов.
Например, описанная выше задача могла бы быть запрограммирована так:

Слева и справа в такой программе мы видим вертикальные шины питания, соединенные горизонтальными цепями. Цепи могут состоять их контактов и некоторых дополнительных элементов (например, таймер) соединенных параллельно или последовательно. Справа каждая цепь заканчивается обмоткой реле. Контакты этого реле могут в свою очередь присутствовать в других цепях. Таким образом, можно составить достаточно сложную схему аналогичную по функциональности реальной релейной схеме.
Первые программирующие станции представляли собой весьма громоздкие устройства, транспортируемые силами нескольких человек. Тем не менее, ПЛК активно начали заменять еще более громоздкие и главное обладающие “жесткой” логикой шкафы релейной автоматики.
Физически ПЛК представляет собой один или несколько блоков, имеющих определенный набор выходов и входов, для подключения датчиков и исполнительных механизмов (см. рис.1).
Логика его работы описывается программно и выполняется встроенным микропроцессором. В результате, абсолютно одинаковые ПЛК могут выполнять совершенно разные функции. Для изменения алгоритма работы не требуется каких либо переделок аппаратной части.

Рис. 1. Принцип работы ПЛК
Развитие электроники привело к потрясающей миниатюризации ПЛК. Сегодня существуют миниатюрные программируемые контроллеры, оснащенные небольшим дисплеем и встроенными возможностями программирования, подобные контроллеры получили название программируемых реле. Типовые задачи программируемых реле - очень простые локальные системы, имеющие до десятка входов и несколько силовых релейных выходов.
Написать более сложную программу с помощью встроенного пульта непросто. Аналогично мы легко можем набрать текст SMS на клавиатуре сотового телефона, но даже ввод нескольких страниц текста, не говоря уже о больших объемах, представляется проблематичным. Для этого существуют персональные компьютеры (PC), предоставляющие гораздо более комфортабельные условия работы человека.
Один современный ПЛК способен заменить десятки регуляторов, сотни таймеров и тысячи реле. Используя PC запрограммировать такую систему совсем не сложно. Применение PC в качестве программирующей станции ПЛК является сегодня доминирующим решением. Это не только упрощает программирование, но и решает задачи архивирования проектов, подготовки документации, визуализации и моделирования. Компьютер дает удобный универсальный инструмент как для программирования простейших локальных задач на ПЛК, так и для АСУ ТП.
Обратите внимание что, говоря о программировании ПЛК, мы все время возвращаемся к тому, как сделать этот процесс простым и удобным для человека. Казалось бы, однажды запрограммированный ПЛК будет работать годами и не очень важно будет ли его программа выглядеть красиво, главное чтобы она хорошо работала.
К сожалению, это не так. Необходимость изменения программы в ПЛК возникает регулярно иногда и непредвиденно. Поэтому, написана она должна быть так, чтобы любой человек, а не только ее автор мог в ней быстро разобраться и оперативно внести необходимые доработки. Говорить о том, что программы написаны для ПЛК, не вполне корректно.
Все программы написаны человеком и предназначены для чтения человеком. Любые инструменты программирования дают в конечном итоге микропроцессору инструкции в его машинных кодах. Для него нет разницы, на каком языке написана программа.
Упомянутый выше был изобретен в США в период релейной автоматизации. В Европу мода на ПЛК пришла несколько позднее, когда релейные шкафы были уже успешно заменены на шкафы с логическими микросхемами. Поэтому возникла необходимость изобретения других языков программирования понятных новому поколению инженеров.
Так в Германии появились языки простых текстовых инструкций напоминающих ассемблер (IL). Во Франции возникли графические и высокоуровневые диаграммы описания этапов и условий переходов (Графсет, современный SFC). Применялись также языки, используемые для программирования компьютеров (Pascal, Basic). В конце семидесятых годов сложилась крайне сложная ситуация.
Каждый изготовитель ПЛК (в том числе и в СССР) разрабатывал собственный язык программирования, поэтому ПЛК разных производителей были программно несовместимы, кроме того существовала проблема аппаратной несовместимости. Замена ПЛК на продукт другого изготовителя превратилась в огромную проблему. Покупатель ПЛК был вынужден использовать изделия только одной фирмы либо тратить силы на изучение разных языков и средства на приобретение соответствующих инструментов.
В итоге в 1979 году в рамках Международной Электротехнической Комиссии (МЭК) была создана специальная группа технических экспертов по проблемам ПЛК. Ей была поставлена задача выработать стандартные требования к аппаратным средствам, программному обеспечению, правилам монтажа, тестирования, документирования и средствам связи ПЛК.
В 1982 году был опубликован первый черновой вариант стандарта, который получил наименование МЭК 1131. Ввиду сложности получившегося документа, было решено разбить его на несколько частей, вопросам программирования посвящена третья часть стандарта “Языки программирования ПЛК”.
Поскольку с 1997 года МЭК перешел на 5 цифровые обозначения, в настоящее время правильное наименование международной версии части стандарта посвященной языкам программирования ПЛК - МЭК 61131-3. Рабочей группой МЭК было принято достаточно оригинальное решение. Из всего многообразия существовавших на момент разработки стандарта языков программирования ПЛК были выделены 5 языков, получивших наибольшее распространение.
Спецификации языков были доработаны, так что стало возможным использовать в программах написанных на любом из этих языков стандартизованный набор элементов и типов данных. Такой подход МЭК не раз подвергался критике, но время доказало правильность этого решения.
Реализация подобного подхода позволила привлечь к программированию одного и того же ПЛК специалистов различных областей знаний (и что особенно важно - различной квалификации): специалистов по релейной автоматике (и даже электриков), программирующих в LD, специалистов в области полупроводниковой схемотехники и автоматического регулирования для которых привычен язык FBD, программистов, имеющих опыт написания программ для компьютеров на языке ассемблера (ему соответствует язык IL для ПЛК), на языках высокого уровня (язык ST), даже далекие от программирования специалисты-технологи получили свой инструмент программирования - язык SFC.
Хотя внедрение МЭК систем программирования и не позволило полностью отказаться от услуг профессиональных программистов (впрочем такая цель и не ставилась), но зато позволило снизить требования к квалификации и соответственно затраты на оплату труда программистов ПЛК. Стандартизация языков позволила (по крайней мере, частично) решить проблему зависимости пользователя ПЛК от конкретного изготовителя.
Все современные ПЛК оснащаются средствами МЭК 61131-3 программирования, что упрощает работу пользователям контроллеров (можно использовать ПЛК различных фирм без затрат на переучивание) и одновременно снимает ряд проблем для изготовителей ПЛК (можно использовать компоненты ПЛК других изготовителей).
Стандарт существенно расширил возможности на рынке труда специалиста, занимающегося программированием ПЛК. Подобно тому как автомеханик, имеющий стандартный набор инструментов, может браться за ремонт любого узла (кроме нестандартных) машины любой фирмы, так и специалист, изучивший языки МЭК 61131-3 сможет разобраться с программой любого современного ПЛК. Это позволило уменьшить как зависимость фирмы от специалиста по программированию ПЛК, так и специалиста от фирмы.

На сегодняшний день лидирующие позиции на рынке МЭК систем программирования занимает немецкой компании 3S-Smart Software Solutions GmbH. Его применяют 190 компаний во всем мире, большинство из этих компаний - ведущие изготовители оборудования и/или систем промышленной автоматизации.
В России ПЛК с CoDeSys хорошо известны специалистам, диапазон продукции, выпускаемой под управлением этих ПЛК огромен CoDeSys включает 5 специализированных редакторов для каждого из стандартных языков программирования:
Список Инструкций (IL),
Функциональные блоковые диаграммы (FBD),
Релейно-контактные схемы (LD),
Структурированный текст (ST),
Последовательные функциональные схемы (SFC).

Редакторы поддержаны большим числом вспомогательных инструментов, ускоряющих ввод программ. Это ассистент ввода, автоматическое объявление переменных, интеллектуальная коррекция ввода, цветовое выделение и синтаксический контроль при вводе, масштабирование, автоматическое размещение и соединение графических элементов.
В одном проекте можно совмещать программы, написанные на нескольких языках МЭК либо использовать один из них. Никаких особых требований по выбору языка нет. Он обусловлен исключительно личными предпочтениями.
В России наиболее популярен язык ST. Это текстовый язык, представляющий собой несколько адаптированный Паскаль. Второе место по популярности занимает графический язык FBD, далее следует язык LD. Помимо средств подготовки программ, CoDeSys включает встроенный отладчик, эмулятор, инструменты визуализации и управления проектом, конфигураторы ПЛК и сети.
Воплощением еще одной неожиданной идеи, коллективно сформированной пользователями CoDeSys, стало добровольное объединение изготовителей ПЛК, поддерживающих CoDeSys, в некоммерческую организацию CoDeSys Automation Alliance (САА). Суть идеи в том, чтобы превратить изготовителей средств промышленной автоматизации, поддерживающих CoDeSys, в партнеров (насколько это возможно на конкурентном рынке) и нейтрализовать последствия конкуренции между изготовителями для пользователей ПЛК.
Вместо намеренного создания технических препятствий, не позволяющих пользователям легко использовать продукты другой компании, члены САА целенаправленно принимают меры призванные обеспечить совместимость своих продуктов.
Пользователь может быть уверен, что его прикладная CoDeSys-программа будет работать в любом контроллере любой компании являющейся членом САА. Пользователь может быть уверен, что используемые им инструменты (CoDeSys) проверены тысячами пользователей во всем мире. Пользователь всегда может обсудить свои затруднения и получить реальную помощь от широкого круга коллег, имевших опыт решения подобных задач.
Брокарев А.Ж., Петров И.В. Компания "ПРОЛОГ"
15 09.2016
Перед тем, как программировать ПЛК в среде разработки CoDeSyS 2.3 новички часто задаются вопросом: А какие системы требуется установить для корректной работы с аппаратом?? А как конфигурировать входы и выходы контроллера?? А каким образом связать устройство с ПК?? И снова, а как, а как?? Все мы с вами понимаем, устройства сложные и алгоритмы объёмные, и на изучение потребуется время. Я вот думаю, может написать небольшую книжку и назвать codesys для чайников? А вы согласны?
Из этой статьи вы узнаете:
Здравствуйте уважаемые коллеги и гости. Пишет вам автор блога сайт, Гридин Семён, и в этой статье я вам расскажу, как правильно программировать контроллер. Тема достаточно актуальная, я надеюсь после прочтения статьи, некоторые вопросы отпадут самим собой. =)
Как работает ПЛК?
ПЛК(программируемый логический контроллер) — это устройства полностью автоматизирующие работу аппаратов, различных агрегатов и станков. Фактически, это некий блок, который содержит входы и выходы, для подключения датчиков и исполнительных органов. Внутри прописывается логика.
Вычисления в устройстве выполняются циклически. То есть одни и те же действия выполнения программы выполняются в короткий промежуток времени.
В один цикл осуществляемый прибором выполняются следующие операции:
- Начало цикла;
- Чтение состояния входа;
- Выполнение кода пользователя;
- Запись состояния выходов;
- Обслуживание аппаратных ресурсов;
- Монитор системы исполнения;
- Контроль времени цикла;
- Переход на начало цикла;
Не буду больше разглагольствовать по теории. Давайте сразу перейдём к практике.
Из чего состоит программный комплекс для полноценной работы с ПЛК
Конечно вам поначалу покажется, что слишком много нужно знать, чтобы связать друг с другом основное приложение и утилитки, а потом соединить устройство. Я хочу вам сказать, что ничего сложного в процессе установки и связей — нет. В этом поможет моя статья.
Для начала нам нужно установить основной дистрибутив CoDeSyS 2.3 c официального сайта ОВЕН . А, я предлагаю во многих постах, касающихся программирования, использовать устройство ОВЕН ПЛК63 . Так как это универсальное устройство с экраном. У него на борту есть и дискретные входы, и аналоговые входы, и релейные выходы.
Итак, скачиваем программу:

Затем следует стандартная процедура установки. Указываем путь и все время жмём “Далее”, “Далее”.

Следующим этапом будет установка таргетов для плк. Таргет — это некое описание о конфигурации ПЛК. Инструкция подсказывает CoDeSyS 2.3, какое количество и какие входы/выходы имеет устройство.
Скачиваем также с сайта ОВЕН
. Рекомендую установить все таргеты, которые там есть. Чтобы потом не искать и не думать об этом, если придется писать алгоритм на другой ПЛК.
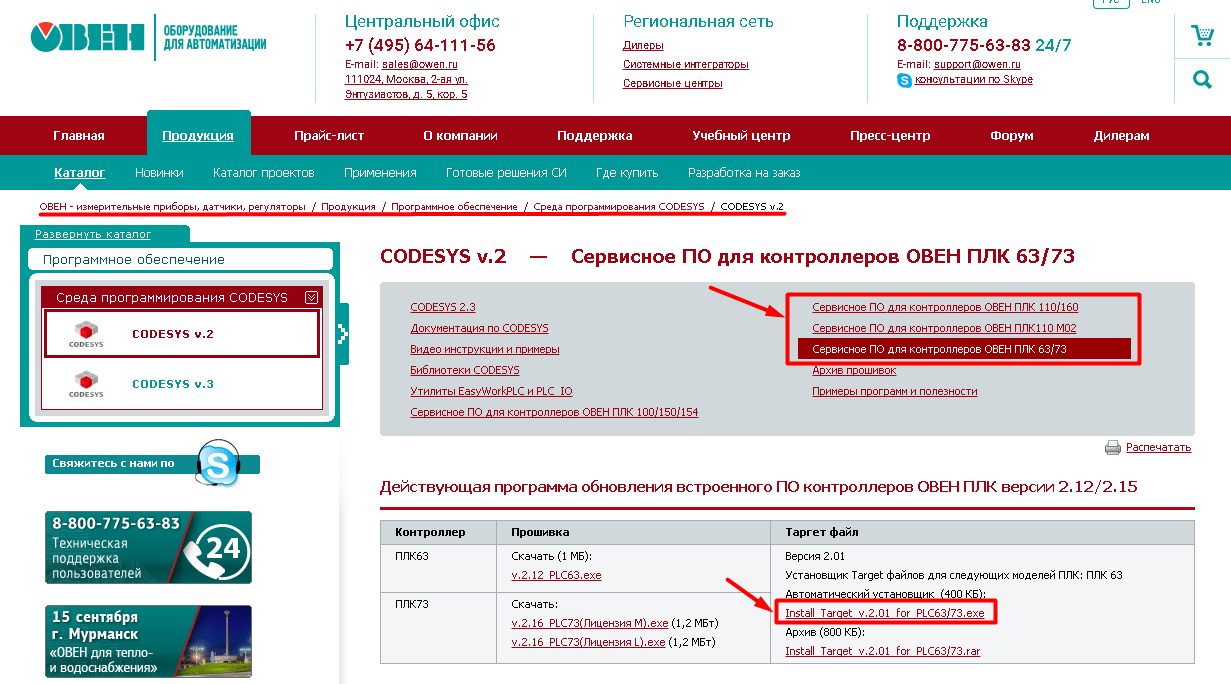
Запускаем автоматический установщик, устанавливаем инструкции. Всё, половину пути мы с вами уже сделали в этой работе! После этих всех процедур можно устанавливать библиотеки, но о них позже. Переходим к следующему пункту.
Рабочее окно программы
Дистрибутив мы с вами установили, таргеты тоже. Давайте мы с вами рассмотрим рабочее окно среды разработки, элементы меню и основные вкладки.

Основное поле на рисунке выше делится на три области:
- Редактор переменных и их типов;
- Дерево объектов;
- Редактор основного алгоритма программы;
Редактор переменных — здесь мы с вами вводим переменные и присваиваем им типы данных. Для тех, кто не знает, переменная — это имя, к которому будет обращаться программа и возвращать результат. А тип данных определяет род информации, диапазон представления чисел и множество других операций.
Дерево объектов — в этом окне располагаются такие объекты, как функции, функциональные блоки, подпрограммы, конфигурация ПЛК, библиотеки. Об этом я расскажу позже.
Редактор программы —
тут мы с вами описываем основной алгоритм программы работы контроллера. Пишется на любом языке стандарта МЭК. Более подробно, можете
статью
.
Простой пример на ST
Для удобства восприятия информации я постарался структурировать. Поэтапно расписал последовательность действий. Если возникнут вопросы или пожелания, обязательно пишите в комментариях.
Изначально я размещу в статье код на языке ST. Логика работы заключается в следующем: на дискретный вход прибора подаётся сигнал и через задержку времени включается выход. В принципе задача простая, и мы с вами её решим.
Код codesys2.3
PROGRAM PLC_PRG VAR T1:TON; ("таймер") Timer_Ust:WORD:=5; ("уставка таймера") Time_tekuch:TIME; ("текущее время") END_VAR T1(IN:=Start , PT:=DWORD_TO_TIME(Timer_Ust*1000)); Time_tekuch:=T1.ET; IF T1.Q THEN Out:= 1; ELSE Out:=0; END_IF;
PROGRAM PLC_PRG T1 : TON ; ("таймер" ) Timer_Ust : WORD : = 5 ; ("уставка таймера" ) Time_tekuch : TIME ; ("текущее время" ) END_VAR T1 (IN : = Start , PT : = DWORD_TO_TIME (Timer_Ust * 1000 ) ) ; Time_tekuch : = T1 . ET ; IF T1 . Q THEN Out : = 1 ; ELSE Out : = 0 ; END_IF ; |
Запускаем наш дистрибутив, создаём новый проект, указываем нужный нам таргет. Не забудьте предварительно проверить, что у вас установлены драйвера на преобразователь USB-COM, он нам понадобится для связи.


В листинге присутствуют две глобальные переменные Start и Out. Они связаны с физическими входами и выходами. Настройки все мы осуществляем во вкладке конфигурация ПЛК.

Компилируем проект (проверяем его на актуальность кода, чтобы не было ошибок). Можно нажать кнопку F11.

Вводим нужные настройки связи, как на картинке.

Собираем нашу схему логического программируемого контроллера. Подключаем интерфейс RS-232 с одной стороны и USB с другой. Жмём “подключение”. Ощущаем радость от процесса. =)) Если произошла ошибка связи , то проверьте ещё раз все подключения и параметры. Часто бывает, что провод преобразователя оборван.
Весь процесс я записал на видео, если будет что-то непонятно.
В следующей статье я напишу о , не пропустите. Будет интересно.
Успешных вам внедрений, дорогие читатели и гости. Если понравилась статья, подписывайтесь на новости блога и расскажите друзьям. А на каком языке и оборудовании вы предпочитаете строить систему автоматизации?
С уважением, Гридин Семён.
Итак, вы решили изучать программирование ПЛК (Программируемых Логических Контроллеров). С чего стоит начать изучение программирования контроллеров? Какие учебные материалы искать, стоит ли заниматься этим самостоятельно или лучше пойти на курсы, сколько времени займёт обучение и насколько оно будет сложным? Доступно ли программирование ПЛК всем или для этого нужно быть программистом? Как быстро стоит переходить от теории к практике? Мы подготовили ответы на эти и другие вопросы.
1. Для того чтобы начать изучать программирование ПЛК, быть программистом вовсе не обязательно. Достаточно иметь так называемый логический склад ума. Если вы любили математику и информатику в школе - скорее всего, у вас всё получится.
2. Однако определённые навыки и понимание машинной логики все же необходимы. Если вы изучали в школе или институте основы программирование на Паскале, Бейсике или Ассемблере - это значительный плюс.
3. Первые шаги в программировании ПЛК можно и даже лучше всего делать самостоятельно, это позволит изучить основы в комфортном для себя темпе. Учебных материалов о ПЛК и их программировании достаточно много в интернете, а приблизительный план для самостоятельного обучения вы можете найти в этой статье.
4. А вот сразу после изучения основ следует обратить своё внимание на профессиональные курсы и руководства. От своего имени особо рекомендуем видеокурс по Simatic Step 7, который можно купить на сайте http://step7-kurs.ru. Этот курс как нельзя лучше подходит для новичков, в то же время Simatic Step 7 используется для разработки систем автоматизации для ПЛК Simatic - одних из самых популярных и востребованных на сегодня контроллеров.
5. После того как вы сделаете свои первые шаги step 7 - милости просим на специализированные форумы: здесь вы сможете не только «задачки порешать», но и уже начинать подыскивать работу или стажировку.
6. Время, необходимое для изучения программирования ПЛК, - параметр индивидуальный. Однако в любом случае это займёт у вас гораздо меньше времени, чем попытки освоить Java или C#.
Темы, которые стоит изучить самостоятельно до того, как вы приступите к изучению профессиональных курсов (т. е. на этапе самообучения):
1. Требования техники безопасности при работе с ПЛК
. Хотя в начале обучения вам, возможно, будет казаться, что эта тема вам не нужна - все же потратьте некоторое время и изучите ТБ работы с ПЛК. Пригодится обязательно.
2. Назначение, функции, принципы работы и конструкция ПЛК
. Условия, в которых работают ПЛК и требования к ним. Если вы раньше занимались радиотехническим конструированием - эта тема не составит для вас особого труда.
3. История ПЛК
. Необязательная, но весьма интересная часть.
4. Знакомство с основными языками программирования ПЛК
согласно стандарту МЭК-61131-3: Sequential Function Chart (SFC), Function Block Diagram (FBD), Ladder Diagrams (LАD), Statement List (STL), Instruction List (IL).
5. Знакомство со средой разработки
, лучше всего - с двумя-тремя наиболее популярными. Например, это могут быть CoDeSys и Simatic Step 7.
6. Изучение методики программирования ПЛК
. Структуризация программы, вызов подпрограмм, задание циклов и времени работы программы.
7. Основные команды (операторы)
. К этому моменту вы уже должны были определиться с языком программирования и средой разработки, наиболее симпатичной лично вам.
8. Функции и функциональные блоки
.
9.Примеры кода работающих программ.
10. Практикум
. При написании собственных программ переходите от элементарных задач к более сложным. На этом этапе нет ничего плохого в том, чтобы использоваться в своих программах части чужого кода, однако старайтесь со временем уменьшать их количество (в процентном выражении).
Как и было описано, в первой статье, ПЛК осуществляет циклическое чтение входов, выполнение прикладной программы и запись выходов. Потому написание программы для ПЛК отличается от традиционного написания программы для микроконтроллеров и ПК. К программам для ПЛК предъявляются жесткие требования по надежности, одно дело зависает текстовый редактор, а другое дело программа, управляющая ядерным реактором. Другое не менее важное требование – это своевременное реагирование на событие. А что значит, во время не прореагировать на событие в промышленности? Это значит потерять контроль над технологическим процессом. Что в некоторых случаях, примером с реактором, приведет к непоправимым последствиям.
Рассмотрим отличия написания программы для ПЛК и микроконтроллера. Для примера возьмем простейшую задачку для МК - мигающий светодиод. Подозреваю, что все начинали знакомство с МК именно с этой задачи. Алгоритм будет следующим
- Записать в порт лог. 1.
- Временная задержка
- Записать в порт лог.0.
- Временная задержка
- Переход по метке на начало программы.
По данному алгоритму программа на ПЛК работать не будет, она содержит бесконечный цикл. А в ПЛК вся прикладная программа выполняется от начала до конца в каждом рабочем цикле, и любая программа должна отдавать управление системной программе. Поэтому при такой организации алгоритма наш ПЛК зависнет. Даже если и убрать, переход по метке на начало, программа не будет работать, так как нам хочется. Порт всегда будет в состоянии лог.0, так как физическая установка выходов производиться только после выполнения всей прикладной программы. И поэтому промежуточные состояния это всего лишь программные переменные в памяти, и на аппаратной части она ни как не отображаются.
В дополнение задержку времени тоже хорошо бы организовать с помощью таймера, периодически проверяя его значение, а не ожидать в пустую пока это время пройдет, наверняка для контроллера найдется другая более важная работа.
С учетом выше сказанного, правильный алгоритм будет выглядеть следующим образом:
1. Проверить таймер, если время паузы вышло, то
а) инвертировать выход
б) начать новый отсчет
2. Конец программы
Реализуем данный алгоритм на практике ниже, а теперь рассмотрим основные особенности LAD (Ladder Diagram) языка.
Релейная схема представляет собой две вертикальные шины, между ними расположены горизонтальные цепи образованные контактами и обмотками реле. Пример на рисунке:
Нормально разомкнутый контакт
Нормально замкнутый(инверсный) контакт
Обмотка реле
Количество контактов цепи может быть разным, а обмотка одна.
Любому контакту ставится в соответствие логическая переменная, определяющая его состояние. Если нормально замкнутый контакт замкнут, то ИСТИНА, если размокнут – Ложь, для инверсного наоборот, он замкнут когда переменная имеет значение ЛОЖЬ. Имя переменной пишется над контактом и служит его названием.
Последовательно соединенные контакты равносильны логической операции И, а параллельно-монтажное ИЛИ. Инверсный контакт равносилен операции НЕ. Параллельное соединение обмоток допускается, а последовательное нет. Обмотка реле также может быть инверсной, тогда она копирует в соответствующую логическую переменную инверсное состояние цепи.
Идея релейных схем, такова, что все цепи работают параллельно, т.е. ток во все цепи подается одновременно. Но мы знаем, что программу процессор выполняет последовательно, и мы не можем это сделать одновременно. Так и в LAD программа выполняется последовательно слева направо, сверху вниз. Но цикл процессора мал, поэтому и получается эффект параллельности.
Любая переменная в рамках одной цепи имеет одно и то же значение. Если даже реле в цепи изменит переменную, то новое значение поступит на контакты только в следующем цикле. Цепи расположенные выше получают новое значение переменной сразу, а цепи расположенные ниже – только в следующем цикле. Строгий порядок выполнения очень важен, и благодаря ним LAD- диаграмма сохраняет устойчивость при наличии обратных связей.
Хоть это и противоречит аналогии LAD с релейными схемами, порядок выполнения LAD- программы можно нарушить с помощью меток и переходов. Это ухудшает читаемость программе, и в них бывает сложно разобраться, но как говориться если очень хочется, то можно. Для этого желательно разбить программу на модули, и делать переходы между модулями.
Возможности LAD программы можно расширить, вставляя функциональные блоки. Вставлять можно все стандартные функциональные блоки, которые содержаться в МЭК. Описание для функциональных блоков можно найти в справке.
Давайте составим нашу первую программу на LAD в среде CoDeSys. , достаточно воспользоваться поисковиком
После установки, выбираем создать новый проект, и CoDeSys попросит выбрать целевую платформу для ПЛК. Указание целевой платформы необходимо, чтобы среда знала, для какого типа контроллера пишется программа. Выбираем 3S CodeSyS Sp PLCWinNT V2.4 и жмем OK.

Имя проекта оставляем по умолчанию, язык выбираем LD

Интерфейс программы на русском языке, и интуитивно понятен. При наведении на элемент всплывает имя. Советую рассмотреть все элементы, а также пункты главного меню.

Для добавления элемента в программу необходимо левой кнопкой мыши кликнуть в рабочее поле программы и потом ЛКМ кликнуть на элемент, который вы хотите поместить в программу. Например, нормально разомкнутый контакт, у вас должно получиться следующее.
Вместо вопросительных знаков пишем имя нашей переменной, например SB, и нажимаем Enter, выходит окно объявление переменной, выбираем Bool и нажимаем OК.

Рассмотрите, какие типы можно выбрать, а также какие классы переменных.
Давайте, реализуем программы для мигания светодиодом, а если говорить в общем, то программа для генератора одиночных импульсов
Для реализации программы используем функциональные блок таймер TP. Таймер TP – этой таймер одиночного импульса с заданной по входу PT длительностью.
Пока IN равен FALSE, выход Q = FALSE, выход ET = 0. При переходе IN в TRUE выход Q устанавливается в TRUE и таймер начинает отсчет времени на выходе ET до достижения длительности, заданной PT. Далее счетчик не увеличивается. Таким образом, выход Q генерирует импульс длительностью PT по фронту входа IN.

Для вставки TP, на панели элементов выбираем:

И у нас всплывает ассистент выбора функционального блока.

Скачайте файл проекта, и давайте рассмотрим как он работает.

В начальный момент X= False , поэтому инверсный контакт X замкнут и таймер T2 запущен, выход Q= True, поэтому цепь включена. А так как обмотка в цепи инверсная, значит она копирует инверсное состояние цепи в X , и X остается False, после переполнения таймера Q = False , и инверсная обмотка переводит X в True. После этого запускается T1, после переполнения скидывает X в False и все повторяется. Переменная X является выходом генератора. Таймер T2 устанавливает паузу, а T1 длительность импульса.
Компилируем проект Проект -> Компилировать
В пункте онлайн выбираем Режим эмуляции , а затем Подключение и Старт . И видим, наша схема начинает переключаться, цепь где «протекает ток» выделяется синим цветом. Также в области объявления переменных видим текущее значение переменных.
Выход генератора можно поглядеть с помощью цифрового трассировщика, для этого переходим на вкладку Ресурсы в нижнем левом углу

Выбираем Цифровой трассировщик -> Дополнение -> Настройка трассировки , выйдет следующее окно

Цикличность записи поставим Вручную , нажимаем на менеджер и выбираем переменные X(Bool)

Нажимаем Ok . Выбираем перо для нашей переменной
Выбираем в онлайн Подключение, нажимаем Старт, далее Дополнительно -> Начать трассировку, также выберите пункт Автоматическая трассировка

Рассмотрим еще один пример управление двигателем с электронной коммутацией обмоток статора
Саму программу представлять не буду, скачайте проект. А об алгоритме работы расскажу.
Все таймеры запускаются по сигналу старт. Каждый таймер отмеряет момент окончания фазы. Переменные Y1-Y3 являются выводами соответствующей фазы управления. Каждый выход включается в том случае, если таймер еще не переполнен и выключен предыдущий выход. Последняя цепь, является цепью автоматического перезапуска.

С чего начиналась промышленная автоматика? А начиналось все с контактно-релейных схем управления промышленными процессами. Кроме жуткого «шелестения», контактно релейные схемы имели фиксированную логику работы, и в случае изменения алгоритма, необходимо основательно переделать монтажную схему
Бурное развитие микропроцессорной техники, привели к созданию систем управления технологическими процессами на базе промышленных контроллеров. Но это не означает, что реле изжили себя, у них просто своя ниша для применения.
ПЛК – программируемый логический контроллер , представляют собой микропроцессорное устройство, предназначенное для сбора, преобразования, обработки, хранения информации и выработки команд управления, имеющий конечное количество входов и выходов, подключенных к ним датчиков, ключей, исполнительных механизмов к объекту управления, и предназначенный для работы в режимах реального времени.
Принцип работы ПЛК несколько отличается от «обычных» микропроцессорных устройств. Программное обеспечение универсальных контроллеров состоит из двух частей. Первая часть это системное программное обеспечение. Проводя аналогию с компьютером можно сказать, что это операционная система, т.е. управляет работой узлов контроллера, взаимосвязи составляющих частей, внутренней диагностикой. Системное программное обеспечение ПЛК расположено в постоянной памяти центрального процессора и всегда готово к работе. По включению питания, ПЛК готов взять на себя управление системой уже через несколько миллисекунд. ПЛК работают циклически по методу периодического опроса входных данных.
Рабочий цикл ПЛК включает 4 фазы:
1. Опрос входов
2. Выполнение пользовательской программы
3. Установку значений выходов
4. Некоторые вспомогательные операции (диагностика, подготовка данных для отладчика, визуализации и т. д.).
Выполнение 1 фазы обеспечивается системным программным обеспечением. После чего управление передается прикладной программе, той программе, которую вы сами записали в память, по этой программе контроллер делает то что вы пожелаете, а по ее завершению управление опять передается системному уровню. За счет этого обеспечивается максимальная простота построения прикладной программы – ее создатель не должен знать, как производится управление аппаратными ресурсами. Необходимо знать с какого входа приходит сигнал и как на него реагировать на выходах
Очевидно, что время реакции на событие будет зависеть от времени выполнения одного цикла прикладной программы. Определение времени реакции – времени от момента события до момента выдачи соответствующего управляющего сигнала – поясняется на рисунке:

Обладая памятью, ПЛК в зависимости от предыстории событий, способен реагировать по-разному на текущие события. Возможности перепрограммирования, управления по времени, развитые вычислительные способности, включая цифровую обработку сигналов, поднимают ПЛК на более высокий уровень в отличие от простых комбинационных автоматов.
Рассмотрим входа и выхода ПЛК. Существует три вида входов дискретные, аналоговые и специальные
Один дискретный вход ПЛК способен принимать один бинарный электрический сигнал, описываемый двумя состояниями – включен или выключен. Все дискретные входы (общего исполнения) контроллеров обычно рассчитаны на прием стандартных сигналов с уровнем 24 В постоянного тока. Типовое значение тока одного дискретного входа (при входном напряжении 24 В) составляет около 10 мА.
Аналоговый электрический сигнал отражает уровень напряжения или тока, соответствующий некоторой физической величине, в каждый момент времени. Это может быть температура, давление, вес, положение, скорость, частота и т. д.
Поскольку ПЛК является цифровой вычислительной машиной, аналоговые входные сигналы обязательно подвергаются аналого-цифровому преобразованию (АЦП). В результате, образуется дискретная переменная определенной разрядности. Как правило, в ПЛК применяются 8 - 12 разрядные преобразователи, что в большинстве случаев, исходя из современных требований по точности управления технологическими процессами, является достаточным. Кроме этого АЦП более высокой разрядности не оправдывают себя, в первую очередь из-за высокого уровня индустриальных помех, характерных для условий работы контроллеров.
Практически все модули аналогового ввода являются многоканальными. Входной коммутатор подключает вход АЦП к необходимому входу модуля.
Стандартные дискретные и аналоговые входы ПЛК способны удовлетворить большинство потребностей систем промышленной автоматики. Необходимость применения специализированных входов возникает в случаях, когда непосредственная обработка некоторого сигнала программно затруднена, например, требует много времени.
Наиболее часто ПЛК оснащаются специализированными счетными входами для измерения длительности, фиксации фронтов и подсчета импульсов.
Например, при измерении положения и скорости вращения вала очень распространены устройства, формирующие определенное количество импульсов за один оборот – поворотные шифраторы. Частота следования импульсов может достигать нескольких мегагерц. Даже если процессор ПЛК обладает достаточным быстродействием, непосредственный подсчет импульсов в пользовательской программе будет весьма расточительным по времени. Здесь желательно иметь специализированный аппаратный входной блок, способный провести первичную обработку и сформировать, необходимые для прикладной задачи величины.
Вторым распространенным типом специализированных входов являются входы способные очень быстро запускать заданные пользовательские задачи с прерыванием выполнения основной программы – входы прерываний.
Дискретный выход также имеет два состояния – включен и выключен. Они нужны для управления: электромагнитных клапанов, катушек, пускателей, световые сигнализаторы и т.д. В общем сфера их применения огромна, и охватывает почти всю промышленную автоматику.
Конструктивно ПЛК подразделяются на моноблочные, модульные и распределенные. Моноблочные имеют фиксированный набор входов выходов

В модульных контроллерах модули входов – выходов устанавливаются в разном составе и количестве в зависимости от предстоящей задачи

В распределенных системах модули или даже отдельные входа-выхода, образующие единую систему управления, могут быть разнесены на значительные расстояния
Языки программирования ПЛК
При создании системы управления технологического процесса, всегда существует проблема по взаимопониманию программиста и технологов. Технолог скажет «нам надо немного подсыпать, чуть подмешать, еще подсыпать и чуть нагреть». И мало когда следует ждать от технолога формализованного описания алгоритма. И получалось так, что программисту нужно долго вникать в тех. Процесс, потом писать программу. Зачастую при таком подходе программист остается единственным человеком, способным разобраться в своем творении, со всеми вытекающими отсюда последствиями. Такая ситуация породила стремлении создание технологических языков программирования, доступные инженерам и технологам и максимально упрощающим процесс программирования
За последнее десятилетие появилось несколько технологических языков. Более того, Международной Электротехнической Комиссией разработан стандарт МЭК-61131-3, концентрирующий все передовое в области языков программирования для систем автоматизации технологических процессов. Этот стандарт требует от различных изготовителей ПЛК предлагать команды, являющиеся одинаковыми и по внешнему виду, и по действию.
Стандарт специфицирует 5 языков программирования:
- Sequential Function Chart (SFC) – язык последовательных функциональных блоков;
- Function Block Diagram (FBD) – язык функциональных блоковых диаграмм;
- Ladder Diagrams (LАD) – язык релейных диаграмм;
- Statement List (STL) – язык структурированного текста, язык высокого уровня. Напоминает собой Паскаль
- Instruction List (IL) – язык инструкций., это типичный ассемблер с аккумулятором и переходам по метке.
Язык LAD или KOP (с немецкого Kontaktplan) похожи на электрические схемы релейной логики. Поэтому инженерам не знающим мудреных языков программирования, не составит труда написать программу. Язык FBD напоминает создание схем на логических элементах. В каждом из этих языков есть свои минусы и плюсы. Поэтому при выборе специалисты основываются в основном на личном опыте. Хотя большинство программных комплексов дают возможность переконвертировать уже написанную программу из одного языку в другой. Так как некоторые задачи изящно и просто решаются на одном языке, а на другом придется столкнуться с некоторыми трудностями
Наибольшее распространение в настоящее время получили языки LAD, STL и FBD.
Большинство фирм изготовители ПЛК традиционно имеют собственные фирменные наработки в области инструментального программного обеспечения. Например такие как «Concept» Schneider Electric, «Step 7» Siemens.
Программный комплекс CoDeSys
Открытость МЭК стандартов привели к созданию фирм занимающихся исключительно инструментами программирования ПЛК.
Наибольшей популярностью в мире пользуются . CoDeSys разработан фирмой 3S. Это универсальный инструмент программирования контроллеров на языках МЭК, не привязанной к какой-либо аппаратной платформе и удовлетворяющим всем современным требованиям.
Основные особенности:
- полноценная реализация МЭК языков
- встроенный эмулятор контроллера позволяет проводить отладку проекта без аппаратных средств. Причем эмулируется не некий абстрактный контроллер, а конкретный ПЛК с учетом аппаратной платформы
- встроенные элементы визуализации дают возможность создать модель объекта управления и проводить отладку, т.е. дает возможность создавать человеко-машинного интерфейса (HMI)
- очень широкий набор сервисных функции, ускоряющий работу программиста
- существует русская версия программы, и русская документация
Литература:
Современные технологии промышленной автоматизации: учебник / О. В. Шишов. Саранск: Изд-во Мордов. ун-та, 2007. – 273 с. ISBN 5-7103-1123-5